图 1.
人体皮肤中的感知器
Figure 1.
Receptors in human skin

人体皮肤是一个极其精巧的智能传感系统, 具有丰富而精密的传感功能, 能够感知外界压力、温度、湿度、材质、流场等多种信息, 并传递给神经系统, 产生相应的生理反应, 实现人与环境的交互.近年来, 随着柔性电子学、仿生学、材料学等的飞速发展, 具有类人皮肤功能的柔性电子皮肤(Electronic Skin, E-skin)应运而生[1~4].由于能够模拟人体皮肤的多维信息感知功能, 电子皮肤在可穿戴电子[5]、健康医疗监测[6]、智能机器人[7]、智能假肢[8]等领域表现出广阔的应用前景, 成为当今重要前沿研究方向之一[9].这些应用需求也对电子皮肤的传感功能、结构特征、信号处理等提出了特殊的要求.首先, 电子皮肤应当具有多维信息的传感能力, 以及高灵敏、高精度、宽量程、低耦合的传感性能; 同时, 电子皮肤还应当具有轻薄化、柔性化、微型化、便携化的结构特点, 并可低成本制备、大面积扩展、易信号处理, 以满足实际应用需求.但是现有的柔性电子皮肤功能集成度还十分有限, 感知信息大多只含有压力/应力、温度和湿度.鉴于人类皮肤具有丰富的感知功能, 能够感知如压力、温度、风场以及接触物材质等多种信息, 因此, 具有多维信息感知功能是人体假肢修复、健康监测、仿人机器人对电子皮肤功能的实际需求.柔性电子皮肤走向应用, 除多信号感知需求外, 利用简单工艺完成大面积低成本的柔性传感器制作, 是拓宽柔性电子传感器应用范围、加速柔性电子皮肤实用化进程的必要手段, 而现有的多功能电子皮肤所集成的压力、温度等传感器往往基于不同的检测原理, 因此在敏感结构上、材料上不相兼容, 造成结构复杂、制备难度大、可靠性差等一系列问题, 这为制备大面积高度集成的电子皮肤带来了很大的挑战.本文论述了电子皮肤的各种感知功能, 如压力、温度、湿度、流场、材质等, 综述了各种功能的检测原理以及多感知集成的实现方法, 主要包括直接集成法、功能材料法和检测统一法, 并论述了三种方法的优缺点.最后总结了电子皮肤多维信息传感集成所面临的挑战和未来的研究方向.
电子皮肤的功能由人体皮肤衍生而来, 其中较为核心的传感功能包括压力、温度、湿度、流场、材质等, 以满足各种场景下的应用需求.
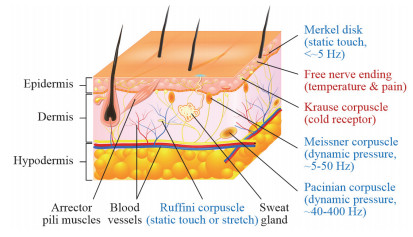
人体皮肤的传感功能由皮肤中的感知器(receptors)实现.如图 1所示, 皮肤中含有多种机械感知器(Mechanoreceptors), 可以感受外界压力信息并产生神经冲动传递给大脑皮层, 形成压力刺激的感觉[2, 10, 11].其中, 机械感知器主要有4种, 如图 1所示, 分别为鲁菲尼氏小体(Ruffini corpuscle)、默克尔小体(Merkel disk)、梅斯纳氏小体(Meissner corpuscle)、巴齐尼氏小体(Pacinian corpuscle), 它们分别用于检测静态压力以及频率小于5 Hz、5~50 Hz、40~400 Hz的动态压力.机械感知器的静态压力分辨率约1 mN[2].温度传感由皮肤中的热感知器(Thermoreceptors)实现, 热感知器主要包括两种, 克劳泽小体(Krause corpuscle)和游离神经末梢(free nerve ending), 其在不同温度刺激下产生不同的神经冲动传输至大脑皮层, 使人体产生不同的冷热感觉[10, 11].人体的热感知器一般难以获取温度的绝对量, 通常在20~25 ℃范围内向神经系统传感“舒适”信号, 但热感知器对温度变化十分敏感[2].
与人体皮肤利用有机组织和神经脉冲等实现传感功能的方式不同, 电子皮肤的传感功能是通过各种基本物理量的转换关系实现.电子皮肤应用分为两类, 一是模拟人体皮肤的感知系统, 此时, 电子皮肤的传感特性应覆盖人体皮肤的传感特性; 另一种是监测人体的生理信号, 此时, 电子皮肤的传感特性应覆盖人体的生理信号, 比如人体体温的范围和分辨率需求, 脉搏、手指压力、脚步压力等压力信号的范围和分辨率需求.两种应用场景下的传感特性需求不同, 相应的结构和材料设计也会有所差异.此外, 电子皮肤应用还需要传感器与人体皮肤的可靠贴合, 要求器件具有柔性、弹性、可拉伸性等特点.实现这些特性有两种手段, 一是器件材料本身具有柔性、弹性、可拉伸性, 比如有机弹性材料、有机可拉伸材料等; 另一种方法是采用曲桥型等结构设计的方法使器件具有柔性、可拉伸性.
压力传感是电子皮肤最为基础的功能, 通过测量接触力、按压力等, 可以使电子皮肤具有监测脉搏、心跳等生理信号的能力, 还能够感知物体硬度、粗糙度等物质信息, 检测接触、按压、抚摸等交互动作, 用于机械手的拾取、抓握等运动控制.按照工作原理, 电子皮肤中压力传感的实现方法, 可以分为压阻式[12]、压容式[13]、压电式[14]、摩擦电式[15]、压热式[16]等几种典型类型.
压阻式压力传感器根据功能材料和工作原理, 又可分为有机掺杂型和无机应变型两种.
有机掺杂型的工作原理通常是在有机弹性基底内部或表面掺杂微/纳导电介质, 当材料受到压力作用后, 有机弹性基底发生变形, 微/纳导电介质之间的相对距离减小, 材料整体的导电性增强, 表现为电阻随压力增大而减小的效果[2, 17~19].常用的有机弹性基底材料有聚二甲基硅氧烷(Polydimethylsiloxane, PDMS)[12, 20~22]、聚氨酯(Polyurethane, PU)[23~25]、氟橡胶[26]、皮革[27]、橡皮泥[28]等, 常用的微/纳导电介质则有金、银、碳等强导电性材料制备的纳米颗粒[29~31]、纳米线[32~34]、纳米棒[20, 35, 36]、纳米管[37, 38]以及石墨烯[28, 39, 40]等.例如, Cheng研究组[33]采用金/银纳米线作为导电介质, 制备了可穿戴压力传感器, 能够检测吞咽、微笑、眼动等人体面部表情; 沈国震研究组[41]利用聚苯胺中空纳米微球(PANI-HNSCF)作为传感介质, 制备了具有31.6 kPa-1的高灵敏度的压力传感器(如图 2(a)所示), 实现了人体脉搏、声音、呼吸等生理信号的检测.压阻传感器的传感性能还可通过对柔性基底进行表面结构处理进行改善[42].例如, 张珽研究组[43]利用丝绸对柔性PDMS基底进行表面微结构处理, 获得了高灵敏压力传感性能, 具有0.6 Pa的检测下限, 能够对蜜蜂、蚂蚁大小的压力产生响应. Someya研究组[26]则利用银微米片、含氟橡胶以及活性剂作为油墨, 通过印刷工艺得到了原位成型的银纳米颗粒以及高性能的有机导电弹性体.
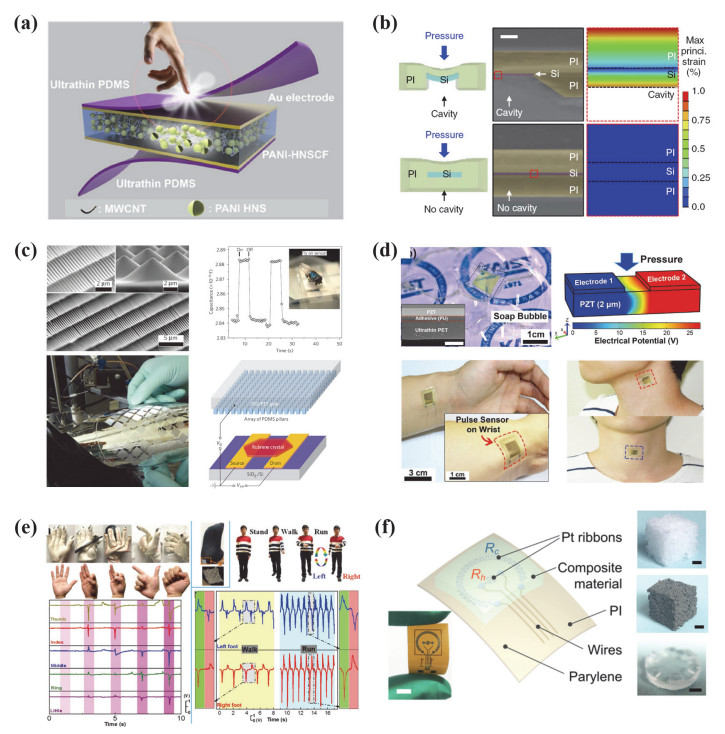
(a) Schematic structure of flexible pressure sensor based on a PANI-HNSCF[41]. (b) Flexible pressure sensors based on stretchable silicon nanoribbon with and without cavities[8]. (c) Capacitive flexible pressure sensors based on microstructured PDMS films[13]. (d) Flexible piezoelectric sensors based on PZT and used for arterial pulse monitoring[47]. (e) Skin-inspired triboelectric nanogenerator based on continuous, planar and "chain-link" fence-shaped interlaced conductive network and used for sensing mechanical stimuli and harvesting biomechanical energy[48]. (f) Flexible pressure sensor based on piezothermic transduction. Porous materials and serial-model materials serve as the functional materials that transfer pressure to thermal condutivity[49]
有机掺杂型压力传感器由于具有低成本、易加工、易调控、模式多样的特点而得到了广泛关注, 但由于其主体成分为不导电的有机弹性材料, 电导率低, 易受接触阻抗的影响.
无机应变型压力传感器的工作原理是利用金属、硅等无机材料的应力应变特性, 其敏感材料通常置于微型空腔上, 当传感器受到压力作用时, 敏感材料发生形变使得自身电阻发生变化[44, 45].例如, Butler研究组[46]利用NiCr作为应变敏感材料制备了柔性压力传感器, 并利用差分信号处理实现了温度补偿; Kim研究组[8]利用p型掺杂硅制备的硅纳米带作为敏感材料, 实现了高灵敏的柔性压力传感器(如图 2(b)所示).
无机材料的优势是电子迁移率大, 可以采用微机械加工方法制造, 后续引线调理手段与已有工艺兼容, 信号输出简单, 但是无机材料的柔性、可拉伸性较差, 需要复杂工艺才能实现类似有机弹性体的柔性, 在柔性要求较高、量程范围较大的应用上较为受限.
压容式压力传感器的工作原理是, 在两块电极板之间放置一块电介质材料构成一个电容, 当传感器受到压力作用时, 上下极板间的距离缩短, 电介质发生变形, 进而引起电容变化.通常, 传感器变形会使得极板间距缩短, 或者电介质的介电常数增大, 因此, 压容传感器的电容一般随外界压力增大而增大[50~53].和压阻传感器相似, 压容传感器通常也是利用PDMS[54~56]或PU[57]等弹性材料制备, 并在接触面复合纳米线[54, 57]、纳米棒[56, 58]、纳米管[55]等材料增强电介质的介电常数以获得高灵敏度.
鲍哲南研究组[13]提出利用具有金字塔型微结构的PDMS基底制备柔性压力传感器(如图 2(c)所示), 实现了高灵敏的压力传感, 并制备了柔性有机场效应晶体管. Lee研究组[56]则通过相交布置两条用PDMS包裹的导电纤维束形成电容, 制备柔性压容传感器, 并将其应用于检测人体手指动作, 进行飞行器和机器人的操控.
压电式压力传感器的工作原理是利用压电材料的压电效应, 当传感器受到压力作用时, 压电材料的两个表面出现正负相反的电荷, 将压力转化为电压信号[47, 59, 60].在柔性传感器中, 常用的压电材料有ZnO[61]、MoS2[62]、P(VDF-TrFE)铁电共聚物[14]、氮化铝薄膜[63]、碳纳米管[64]、石墨烯[65]等材料.
压电传感器是依靠动态变化的压力产生可测量的电流, 在动态压力测量中具有灵敏度高、响应快的优势, 因而常被应用于振动型的压力测量.例如, Lee研究组[47]利用Pb[Zrx, Ti1−x]O3(PZT)压电薄膜制备了柔性压力传感器(如图 2(d)所示), 能够测量桡动脉和颈动脉处的脉搏跳动, 以及由吞咽和呼吸引起的肌肉和声波振动等.
将压电器件与其他效应相结合, 还可以实现静态压力测量.例如, Xu研究组[65]利用PbTiO3纳米线/石墨烯异质结构实现了可以测量静态压力的压电传感器, 其综合利用了压电纳米线的压电极化效应和石墨烯的载流子散布效应, 实现了高灵敏、快响应的静态压力测量.
摩擦电式压力传感器由摩擦纳米发电机衍生而来.摩擦纳米发电机由王中林研究组[66]提出, 其利用摩擦起电和静电感应的原理, 将微小的振动转化为电能的形式, 进行能量收集.因此, 摩擦电式压力传感器通常既具有压力传感的功能, 也具有能量收集的功能, 为可穿戴电子设备和系统提供了一种能源解决方案[67~70].
王中林研究组[48]通过在弹性硅胶中嵌入连续交错的链式栅栏状导电网络, 制备了高传感特性、同时具有良好透明性和拉伸性的压力传感器(如图 2(e)所示), 能够检测人体手势姿态、身体运动状态等信号, 还能在使用过程中收集能量, 实现自供电的人体计步功能.另外, 通过将摩擦电式传感器和力致发光器件相结合, 还能够实现超大量程的压力传感, 覆盖人机交互中常用的压力区间范围; 通过结构优化设计制备大面积压力传感阵列, 能够实现高空间分辨率的阵列式测量和图形化显示[15].张海霞研究组[71]在摩擦起电效应的基础上, 利用空间静电感应, 实现了一种基于织物的自驱动非接触式智能手套, 利用PDMS包裹的纤维制备摩擦面, 利用浸染碳纳米管的棉布制备感应电极, 利用预起电中积累于带电体表面的电荷以及空间位移产生的感应电流, 进行双方向一维位移的定位, 能够检测相距5 cm以内的带电体在传感范围内的运动, 实现非接触式手势识别, 增加了人机交互体验方式.
压电、摩擦电式传感器可以在压力传感的同时, 进行能量收集, 实现传感/能源的组合系统.
压热式压力传感器由朱荣研究组[16, 49]提出, 其工作原理为利用一种具有压热效应的复合功能材料将外界压力转化为材料的导热系数变化, 再由热敏元件检测.具有压热效应的复合功能材料是由至少两种杨氏模量和导热系数均不相同的组成相复合而成, 其材料结构类型主要包括掺杂型、多孔型、串联型等几种典型模式[16, 49].当复合功能材料受到压力作用时, 各组成相由于杨氏模量不同而发生不同程度的变形, 从而改变各组成相在复合材料中的体积分数, 进而引起复合功能材料导热系数的变化.将压热复合功能材料覆盖在被加热的热敏元件上, 热敏元件与周围传导换热强度受到复合功能材料导热系数的影响, 最终通过热敏元件实现材料导热系数的检测, 进而实现压力的检测.
朱荣研究组[49]提出利用PDMS和银纳米颗粒混合, 制备出多孔型和串联型的压热复合功能材料, 进而实现不同传感特性的压力传感器(如图 2(f)所示).基于压热效应的压力传感器具有可定制化设计的特点, 灵敏度和量程等性能可通过材料参数进行调控和定制.例如, 通过优化设计一种渐变孔隙的多孔材料, 利用孔隙率呈梯度变化的多层复合材料可实现高灵敏、低检测下限、大量程的压力传感器, 应用于脚部行走、指部按压等人体运动信息检测[72].通过优化材料结构, 还可实现具有浮、中、沉按压调节的脉搏压力传感器, 可同时监测脉搏、体温、脉搏波传播速度等人体生理信号[73, 74].结合恒温差调理电路, 完成温度自补偿, 实现对压力和温度信号的双模、低/无耦合检测[16].
晶体管式压力传感器相比于电阻、电容式器件, 具有信号串扰小的特点, 在大面积阵列式的压力传感和电子皮肤中具有明显优势.有机场效应晶体管由于具有柔性、可拉伸的特点, 在柔性压力传感中具有广泛的应用[3, 75~80].有机场效应晶体管由源极、漏极、栅极、半导体层和介电层组成, 其压力传感原理是将压力信号直接或间接地转化为有机场效应晶体管信号, 工作原理具有多种类型.比如, Javey研究组[81]制备了基于平行纳米线的晶体管阵列, 利用栅极和漏极进行行列信号扫描, 在源极和地之间放置具有压阻效应的弹性体, 利用弹性体受压力作用后的电阻变化调制晶体管的伏安特性, 实现了高灵敏的压力传感以及阵列化的图形显示.鲍哲南研究组[13]利用PDMS制备晶体管的介电层, 并加工出金字塔型的微结构以降低介电材料的介电常数, 实现了高灵敏的压力传感阵列.李立强研究组[78]则利用具有金字塔型微结构的PDMS制备半导体层和源极、漏极实现压力传感.朱道本研究组[82]设计了悬浮栅极结构的有机薄膜晶体管, 实现了高灵敏、快响应和低功耗的压力传感特性.
温感是人体和外界环境交互的重要信息, 也是电子皮肤需要的基础功能之一.柔性温度传感器主要包括热阻式和热电式两种.
热阻式温度传感器是利用热敏材料的热敏特性, 将温度转化为电阻信息, 通常是在柔性基底上制备热敏薄膜.常见的热敏材料有铂[83]、金[84]、镍[85]等电阻温度系数较大的金属, 掺杂硅等半导体[86, 87], 以及含有特定官能团的石墨烯[88, 89]等有机物.
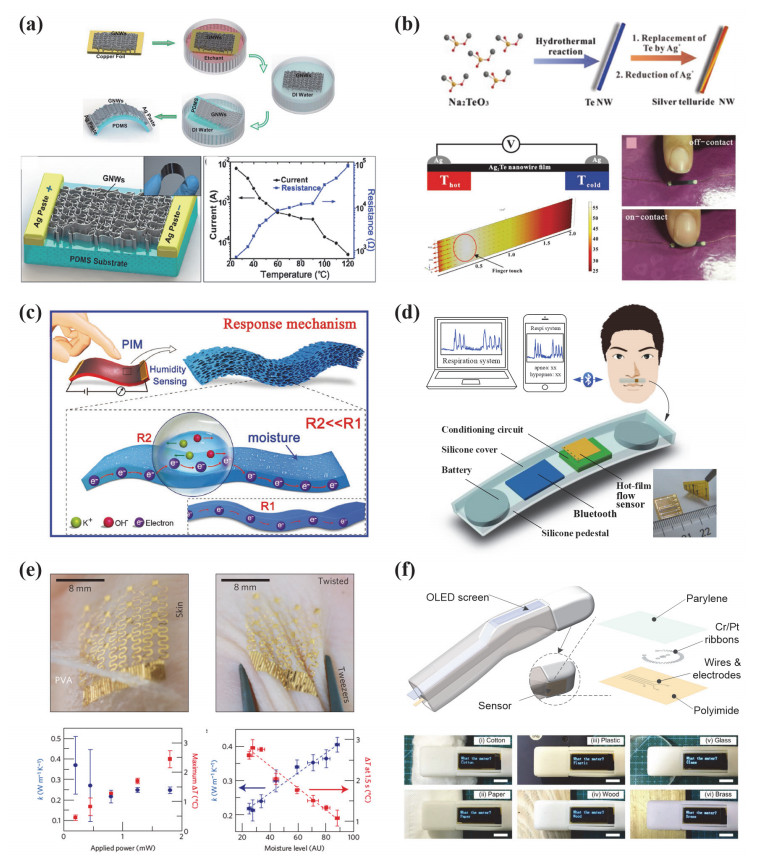
热阻式温度传感器的灵敏度主要与热敏材料的电阻温度系数有关.通常, 半导体具有负电阻温度系数, 其电阻随温度升高而减小[87].金属和石墨烯具有正电阻温度系数, 其电阻随温度升高而增大.相比而言, 金属类温度传感器具有较好的稳定性和较宽的线性区间, 而石墨烯类温度传感器则具有较高的灵敏度, 比金属类高约两个数量级.史浩飞研究组[88]利用聚合物辅助转印的方法, 以石墨烯纳米墙为热敏材料制备了高灵敏柔性温度传感器(如图 3(a)所示), 在35~45 ℃的区间内具有0.214 ℃-1的灵敏度, 满足人体温度测量的需求.
(a) Flexible temperature sensor based on graphene nanowalls[88]. (b) High performance flexible thermoelectric sensor based on silver telluride nanowire[95]. (c) Flexible humidity sensor based on porous ionic membrane[97]. (d) Flexible flow sensor based on hot-film and used for smart sensing strip for noninvasively monitoring respiratory[104]. (e) Ultrathin conformal gold-based devices for thermal characterization of human skin[86]. (f) A smart artificial finger with multisensations of matter, temperature and proximity[105]
热电式温度传感器利用热电材料的塞贝克效应(Seebeck effect)[45], 将温差转化为电压信息.热电式温度传感器的灵敏度主要取决于热电材料的塞贝克系数, 塞贝克系数越大, 灵敏度越高.常用的热电材料有碲纳米线聚合物[90]、碲化铋(Bi2Te3)[91]、碲化锑(Sb2Te3)[92]等.例如, Vieira研究组[92]利用热蒸发工艺制备了塞贝克系数为233 μV/K、电导率为5.0×104 Ω-1•m-1、且厚度小于1 μm的n型Bi2Te3薄膜用于温度传感; Nechache研究组[93]利用脉冲激光沉积方法制备Bi2Te3/Sb2Te3薄膜, 据报道塞贝克系数可达624~678 μV/K, 且制备工艺可在室温条件下进行, 无需退火工艺.
热电式温度传感器和压电式、摩擦电式压力传感器具有相似的特性, 可以进行能量收集, 因此传感器既有传感功能, 又兼具供电功能.与压电、摩擦电不同的是, 热电不需要运动, 只要有温差就可以获得能量, 具有可长期连续收集能量的优势[90].例如, 邓元研究组[94]利用热电发电机制备了自充电的无线温度传感器; 孙蓉研究组[95]以碲化银(Ag2Te)纳米线为基材制备热电薄膜, 实现了一种柔性自供电的温度传感器(如图 3(b)所示), 具有315.1 μW/(mK2)的功率因子.
人体皮肤具有感知环境湿度的能力, 产生舒适或不舒适的感觉, 并提醒人们当前湿度对人体系统正常运转的影响.通常, 环境湿度为45%~65%时, 人体感觉最为舒适.电子皮肤中的湿度传感功能, 一方面可以用于人体皮肤含水量的监测, 提醒人体及时补水护理; 另一方面可以让机械手或假肢获得接触物/环境的湿度/含水信息, 以得到更好的人机交互体验.此外, 合适的环境湿度也是电子设备正常运转的基础条件, 检测环境湿度能够为电子系统的正常运行提供保障信息.
湿度传感器常用的工作原理为电阻抗式[8, 96], 通常在柔性基底上制备金属探测电极, 水分含量会影响检测电极之间的阻抗, 通过检测阻抗大小即可获得湿度信息.
张珽研究组[97]提出了一种电解质类的离子敏柔性湿度传感器(如图 3(c)所示), 制备基于polyvinyl alcohol (PVA)/KOH聚合物电解质的多孔薄膜, 利用气态水分子在多孔薄膜壁上的吸附及电解质在薄膜内部的快速迁移对电流的调控实现湿度测量, 并应用于人体皮肤含水量的检测中.
通过对碳纳米管[98]、碳纳米线圈[99]、石墨烯[100]等进行修饰、调控, 可以得到和水分子进行反应或结合的官能团, 利用碳材料制备湿度传感器也是当前的一大研究方向.如任天令研究组[101]利用多孔石墨烯网络实现了可穿戴式湿度传感器, 并用于人体呼吸气流中的水分检测; Kim研究组[102]则是使用Pt纳米颗粒修饰N型掺杂还原氧化石墨烯实现湿度传感; Lee研究组[103]通过在PU基底上复合还原氧化石墨烯制备表贴式、可拉伸的柔性湿度传感器, 测量范围为10%~70%, 满足监测人体皮肤湿度以及环境湿度的传感特性要求.
人体皮肤对于外界环境的感知还包括对外界流场的感知, 比如有风吹过皮肤时, 气流带走皮肤表面的热量, 人体产生有风吹拂的感觉, 这种感知丰富了人体的环境认知和感官体验.赋予电子皮肤流体感知的功能, 可以使电子皮肤更接近于人体皮肤的精密功能, 和神经科学相结合, 有望实现类人化的智能假肢.
当前在可穿戴电子的研究中, 流体传感器主要用于可穿戴式呼吸监测[106~108]和个人风速风向计[109~111].常用的流体检测原理为热膜/热线法, 将热敏元件加热, 流体流过热源时带走部分热量, 改变热敏元件的电阻, 实现流体检测[112~118].常用的检测元件有金属类热膜、碳纳米管型热线等.
例如, 朱荣研究组利用铂(Pt)金属膜制备出了多种柔性传感器, 包括柔性流速/流向/温度/剪应力传感器[104, 109, 111], 研制出表贴式、无插管、可穿戴睡眠呼吸监测仪(如图 3(d)所示), 能够进行连续8 h的睡眠呼吸气流监测, 并完成了睡眠呼吸暂停综合征的临床应用[104, 119]; 研究组还利用流场传感器进行人体运动和体能监测, 实现对躯干和肢体局部位置的运动评估, 用于体能康复和运动训练[120, 121]. Dinh研究组[122]利用碳纳米管作为热线、石墨烯作为电极、可降解纸张作为基底制备了可穿戴式流速传感器, 进行非侵入式的人体呼吸气流检测.
人体皮肤能够对流动的流体产生感觉, 对于接触的物体, 除了具有压力的感觉外, 还会对接触物的材质产生反应.比如, 人体同时触摸金属和木头时, 因为金属的导热系数大于木头, 会有更多的热量从人体皮肤流向金属, 因此尽管二者的温度相同, 人体仍然会感觉金属比木头更凉爽一些.这种利用热感应进行材质分辨的功能丰富了人体对于环境的认知, 如果加以利用, 将该功能应用于机器人, 则可以丰富机器人的传感系统, 进行材料辨识和物质分拣等.
材质分辨主要基于材料的导热系数进行实现[123], 常用的导热系数测量方法有绝对稳态法[124]、平行热导法[125]、瞬态热光谱法[126]、瞬态热板法[86, 127]、瞬态热线法[128, 129]、激光闪烁法[130]和3ω法[131, 132].绝对稳态法的测量精度最高, 常在计量时使用, 其需要复杂的大型设备以及严格的制样标准, 而且测量时间很长, 往往在小时或者数小时量级[124, 125], 无法满足电子皮肤中小型化和实时性的要求.
瞬态热板/热线法是通过测量待测物接触热板/热线后的热响应进行导热系数测量, 基于瞬态法的导热系数传感器可以实现小型化设计, 能够用于机器人的物质分辨[133~138]或者对人体皮肤热特性(皮肤温度和皮肤导热系数)的监测[86].例如, Rogers研究组[86]研制了一种基于瞬态热板法的高共形的柔性可穿戴热物性传感器(如图 3(e)所示), 可以测量人体皮肤的导热系数和温度变化, 并能够监测人体皮肤的含水量.朱荣研究组[105]研制了一种宽量程的热物性传感器, 利用该种传感器实现了一种智能机械手指(如图 3(f)所示), 可以测量周围环境或接触物的导热系数等热物性参数, 进而实现材料识别、温度和湿度检测、接近感知等功能, 可以模拟人体皮肤分辨材料种类的能力, 对棉花、塑料、玻璃、金属、水果、人手等多种类材料和物质进行识别, 并对目标物的接近距离进行测量, 为机器人的智能感知和安全控制提供了技术手段.
为了提高物质辨识的检测精度, 有研究提出在导热系数的基础上, 综合利用材料的表面纹理、粗糙度、弹性等其他信息进行物质分辨[137, 139~141].例如, Loeb研究组[142]研制了BioTac系统, 其含有一个热敏电阻用于测量材料的导热系数, 以及一个基于水声效应的压力传感器用于测量材料表面弹性/顺应性、纹理/粗糙度等信息, 并利用贝叶斯探测(Bayesian exploration)算法对材料库进行学习和训练, 能够进行十余种常见物质的材料辨识.这类基于多信息融合的人工智能方法, 为了提高容错率, 通常需要大量样本进行训练, 增加了信息获取的难度和算法处理的复杂度.
人体皮肤具有多维信息的感知能力, 电子皮肤的应用场景也要求其具有多感知集成特性, 因此在实现上文所述的功能传感的基础上, 还需要将多感知功能集成在电子皮肤中.根据传感原理和工艺手段, 电子皮肤的多感知集成方法可以粗略地分为“直接集成法”、“功能材料法”、“检测统一法”等三种典型类型.
直接集成法顾名思义就是将多种传感器直接制备在一起, 实现多功能集成传感[84, 85, 143, 144], 其具有“平面展开、上下层叠”的特点.利用这种思路, 可以使用具有良好选择性的传感器进行集成, 使得各个传感器仅对自己所负责的物理信号产生响应, 对其他物理信号不产生响应, 如此可以避免信号之间的相互干扰, 实现各物理量的高精度测量.理论上, 通过直接集成还可以根据目标需求进行任意模块化的功能扩展.
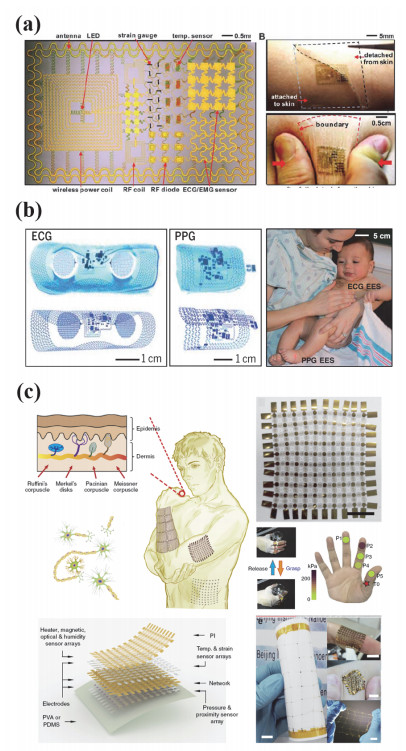
例如, Rogers研究组[1]率先将多种传感器进行单片集成, 并且对系统进行力学特性优化, 实现了弹性模量、刚度、厚度等和人体皮肤相匹配的超薄、高共形的多功能电子皮肤(如图 4(a)所示), 结构中包括了应力传感器、温度传感器、电信号检测电极, 可以实现应力、温度、肌电、心电等人体生理信号在线监测, 该系统还集成了晶体管、发光二极管、射频感应线圈等组件, 能够进行信号调理、光学指示、无线充电等; 因为具有良好的共形性和舒适性, 以及数据原位分析、无线传输等功能, 这种类皮肤电子系统可以贴合在新生婴儿的皮肤上[145], 用于新生儿重症监护(NICU)(如图 4(b)所示).除肌电、脑电、眼电、心电等电学生理信号外[84, 147~149], 研究者们还开始关注人体汗液中的化学成分, 如葡萄糖、电解质盐、乳酸、pH、水分等[150~154], 这些成分是人体健康状态的重要指标, 其中葡萄糖可穿戴无创/微创监测在医疗领域的应用需求尤为迫切.例如, Javey研究组[152]制备了一种可穿戴柔性手环, 集成了多种电化学传感器, 可以实时监测汗液中的葡萄糖、乳酸、Na+、K+等成分, 并可以将信息传输到网络进行医疗诊断等.
(a) Multifunctional electronics with physical properties matched to the epidermis[1]. (b) Wireless multifunctional epidermal electronic systems for neonatal intensive care[145]. (c) Multifunctional sensing matrix networks with skin-inspired highly stretchable and conformable architecture[146]
除了监测人体生理信号, 面向智能假肢和智能机械手的电子皮肤也需要集成多种传感功能. Kim研究组[8]以掺杂硅材料为基础, 设计了多种曲率结构和多层薄膜堆叠的可拉伸硅纳米带, 制备了压力、温度、应变、湿度等多种柔性传感器, 并集成在一起实现了多感知的电子皮肤, 将其应用于机械手上, 实现了多维信息感知反馈的人机交互和医疗护理.潘曹峰研究组[146]研制了集成温度、应力、湿度、压力、接近、光、磁等多达七种功能于一体的可拉伸传感阵列(如图 4(c)所示), 并应用于智能假肢中进行温度和压力的阵列传感, 在智能假肢和智能机器人应用中潜力巨大.
直接将多种传感器进行单片制备, 提供了一种直截了当的集成方法, 可以使用选择性单一的传感器件进行集成, 避免不同物理量测量间的信号耦合.但由于各种传感器的工作原理、结构形式、敏感材料互不相同, 使得集成系统具有十分复杂的结构和工艺流程, 实际应用中的可靠性也面临着极大的挑战.另外, 各种传感器互不相同的工作原理, 还会使得系统的信号调理十分复杂, 比如, 压力传感是电压信号、温度传感是电阻信号、湿度传感是电容信号, 这会增大器件的引线布局难度, 也会消耗很多的信号处理资源.
基于功能材料的集成方法是利用材料的多维感知特性, 同时进行多维信息传感[155~160], 具有“互相交融、同时进行”的特点.具体而言, 又可分为两种子类型.
一种方法是将具有不同传感特性的材料通过布局设计或掺杂设计, 制备成单一器件.例如, 朱道本研究组[161]在多孔PU中复合热电材料PEDOT:PSS得到了基于微结构骨架支撑的有机热电材料(MFSOTE), 综合热电效应和压阻效应, 利用I-V曲线的截距表示温度、利用其斜率表示压力, 实现了温度和压力的双参量测量(如图 5(a)所示). Ko研究组[11]利用Poly(vinylidene fluoride) (PVDF)和还原氧化石墨烯(rGO)进行掺杂设计得到了PVDF/rGO复合材料, 利用PVDF的压电特性测量动态压力、利用其热电特性测量温度, 利用rGO引起的压阻效应测量静态压力, 实现了温度和压力的集成传感, 能够检测体表温度、脉搏跳动等人体生理信号, 还能够检测声波振动、物体表面粗糙度, 用于分辨砂纸、玻璃和纸张等不同表面纹理的材料.
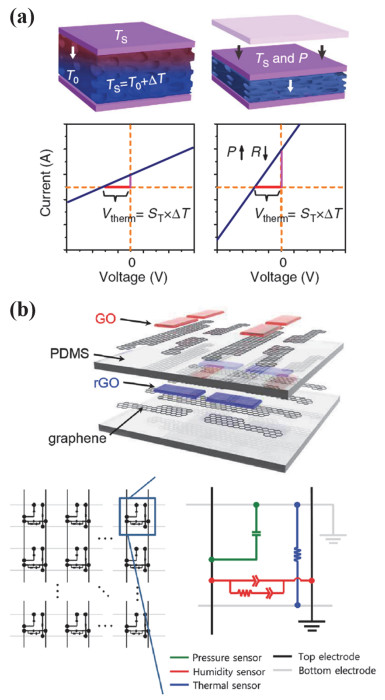
(a) Temperature-pressure dual-parameter sensors using microstructure- frame-supported organic thermoelectric materials[161]. (b) Multimodal all-graphene electronic skin with capabilities of detecting pressure, temperature and humidity[162]
另一种方法是利用同一种材料进行结构或者官能团的设计, 使其具备多信息感知能力, 常用的典型材料是碳纳米管和石墨烯.例如, Kim研究组[155]基于碳纳米管制备了一种压力/温度/湿度三模(triple model)传感器, 但其压力和湿度均采用同一电容信号测量, 存在明显的耦合效应. Cho研究组[162]制备了一种全石墨烯器件, 利用石墨烯作为电极, 利用氧化石墨烯的阻抗测量湿度, 利用还原氧化石墨烯的电阻测量温度, 在二者之间布置PDMS形成电容测量压力, 也实现了压力/温度/湿度的三参数传感(如图 5(b)所示), 其结果表明, 湿度、温度测量不受其他物理量影响, 但压力测量受湿度和温度影响很大.
基于功能材料的集成方法是直接复合多种不同传感特性的材料, 或者利用材料自身的多物理量敏感特性, 进行单结构设计实现高密度、多感知集成, 具有结构工艺简单、易制备实现的特点.但这种方法的局限在于, 一方面, 传感特性受限于功能材料自身的敏感能力以及材料复合时的兼容性, 传感功能的扩展受到限制; 另一方面, 结构的高度集成和材料的复杂特性会导致测量的选择性较差, 各物理量信号之间存在较大耦合效应, 需要从单路或少路信号中提取多种物理量, 对后续调理电路的要求高, 需要消耗较大的信号处理资源, 在复杂的实际工作环境下, 应用性受到限制.
检测统一法是将多种感知传感器统一为一种检测方式, 从而可以采用统一的检测元件实现多感知集成系统, 目前可行的方案是基于热感应原理的多感知集成.
基于热感应的多维信息传感机制由清华大学朱荣研究组提出, 其原理是利用热敏元件和外界的传导/对流换热对自身电阻的调控, 实现压力、温度、导热、湿度、流场等多种信息的集成测量[16, 49, 105, 163~165].其基本思路如图 6(a)所示, 对于一个不发热的热敏元件(将其定义为“冷膜”), 利用热敏元件的温度电阻特性, 通过测量其电阻可以感知环境或接触物的温度.另一方面, 将热敏元件通电加热后, 其自身温度高于环境温度(将其定义为“热膜”), 进而和周围环境或接触物产生热交换, 根据能量守恒关系可以得到[163]:

(a) Schematic of the multi-sensing mechanism. (b) Multifunctional electronic skin based on thermosensation with capabilities of sensing pressure, temperature, matter and flow[163]
|
$ {Q_{{\rm{gen}}}} = {Q_{{\rm{cond}}}}(k) + {Q_{{\rm{conv}}}}(h) + \Delta E(T) $ |
(1) |
其中, Qgen=U2/R为加热功率, U为施加电压, R为热敏元件电阻; Qcond(k)是热敏元件和其接触的固体之间的传导换热, 传导换热强度和接触物的导热系数k相关; Qconv(h)是热敏元件和其接触的流体之间的对流换热, 对流换热强度和表面传热系数h相关; ∆E是热敏元件的内能, 和其温度T有关, 通过测量其电阻可以得到温度信息.
因此, 当流体流过时, 流体和热敏元件之间发生对流换热, 进而影响热敏元件温度, 通过测量热敏电阻即可进行流场测量; 当有接触物和热敏元件接触时, 二者之间存在传导换热, 且传导换热强度和接触物的导热系数k有关, 因此通过测量热敏电阻即可得到接触物的导热系数k; 进一步地, 如果在热敏元件表面覆盖一块复合功能材料, 覆盖层的导热系数k随其所受的压力P而变化(这一效应称作压热效应)[49], 则压力通过改变复合功能材料层的导热系数k来影响其和热膜之间的传导换热, 通过检测热敏电阻可实现压力测量.
这种基于热感应的多维信息传感机制, 在检测原理上实现了多物理量检测的统一.利用这一方法, 可以将压力、温度、湿度、风场、物性参数均转换成热效应, 由薄膜热敏电阻检测, 实现阵列式多功能柔性电子皮肤(如图 6(b)所示), 集成压力、温度、导热、流场等传感功能, 并能够采用统一的扫描式检测电路, 使电子皮肤既能集成多种感知功能, 又具有简单的结构、统一的信号调理检测模式、低信号耦合、易于扩展等优点[163].这种电子皮肤还可以与柔性印刷电路相结合, 实现大面积、低成本制造.
随着当前经济的快速发展, 人们对于健康、社会问题的关注日益增进, 可穿戴健康监测设备、智能陪护机器人、智能假肢等设备将成为未来科技发展的重要方向.可穿戴设备的形式也将不局限于手表、手环, 而是向轻薄化、共形性、表贴式的多功能柔性电子皮肤的方向发展, 实时监测人体脉搏、体温、肌电、心电、皮肤含水量等生理信号, 全方位全时段地呵护人体健康.另一方面, 中国人口已经进入老年型, 65岁及以上人口占总人口的比例已达到10%, 并预计到2040年快速增长至20%, 老年人的生活质量以及社会养老压力都将成为未来不可忽视的重大社会问题, 必然也会激发智能陪护机器人的研究热度和消费市场.具有类人形貌、仿人功能的智能陪护机器人, 将会代替人工完成老年人的护理工作, 它们具有类似人体皮肤的形态和传感能力, 能够在接触、搀扶用户时采用合适的力度和角度以保证舒适, 在接近用户时监测相对距离、提前控制速度和位置以防止不必要的碰撞, 在接触人体皮肤时检测人体的体温、皮肤含水量等生理信号提醒用户做适当的调理.智能陪护机器人的手臂还可被扩展至智能假肢, 通过和神经科学结合[166, 167], 能够赋予假肢机械操纵能力之外的类似人体皮肤的感知能力, 实现真正意义上的假肢修复.此外, 在精密制造、自动化装备领域, 具有举足轻重地位的工业机器人也在向多维感知的智能化发展.
这些应用需要硬件和软件两方面研究的同步深入.硬件系统就是本文的柔性电子皮肤, 一种具有多维信息传感的柔性、轻薄的电子器件.本文从人体皮肤的传感功能入手, 论述了柔性电子皮肤应当具有压力、温度、湿度、流场、材质等几种关键性的传感功能, 综述了各种传感功能的实现手段以及多维信息传感的集成方法.根据当前研究, 集成方法可分为直接集成法、功能材料法和检测统一法等三种.相比于单种传感器, 实现多感知集成传感系统需要综合考虑结构、工艺、测试、耦合等问题.随着传感功能数量的增多, 不可避免地会引起集成难度的增大, 具体而言, 器件结构和工艺复杂度提高, 信号调理难度增大, 各物理量测量时可能出现相互耦合.因此, 既能够进行多种物理信号的集成传感, 又具有简单的结构、工艺、信号调理方法, 并且保证各种物理信号之间测量的独立性, 是多功能电子皮肤研究中的一个关键问题.面向实际工程需求、解决实际工程问题时, 折中考虑功能集成度和实现便利度是一个必要的手段.在科学研究中, 仍需要在新机理和新材料等方面深入探索, 结合实际应用需求寻求创新的技术方案, 这是电子皮肤走向实际应用的必经之路.
Kim, D. H.; Lu, N.; Ma, R.; Kim, Y. S.; Kim, R. H.; Wang, S.; Wu, J.; Won, S. M.; Tao, H.; Islam, A.; Yu, K. J.; Kim, T. I.; Chowdhury, R.; Ying, M.; Xu, L.; Li, M.; Chung, H. J.; Keum, H.; McCormick, M.; Liu, P.; Zhang, Y. W.; Omenetto, F. G.; Huang, Y.; Coleman, T.; Rogers, J. A. Science 2011, 333, 838. doi: 10.1126/science.1206157
Chortos, A.; Liu, J.; Bao, Z. Nat. Mater. 2016, 15, 937. doi: 10.1038/nmat4671
Kaltenbrunner, M.; Sekitani, T.; Reeder, J.; Yokota, T.; Kuribara, K.; Tokuhara, T.; Drack, M.; Schwodiauer, R.; Graz, I.; Bauer-Gogonea, S.; Bauer, S.; Someya, T. Nature 2013, 499, 458. doi: 10.1038/nature12314
Wang, X.; Dong, L.; Zhang, H.; Yu, R.; Pan, C.; Wang, Z. L. Adv. Sci. 2015, 2, 1500169. doi: 10.1002/advs.201500169
Xu, K.; Lu, Y.; Takei, K. Adv. Mater. Technol. 2019, 4, 1800628. doi: 10.1002/admt.201800628
Kim, J.; Campbell, A. S.; de Avila, B. E.; Wang, J. Nat. Biotechnol. 2019, 37, 389. doi: 10.1038/s41587-019-0045-y
Lai, Y. C.; Deng, J.; Liu, R.; Hsiao, Y. C.; Zhang, S. L.; Peng, W.; Wu, H. M.; Wang, X.; Wang, Z. L. Adv. Mater. 2018, 30, 1801114. doi: 10.1002/adma.201801114
Kim, J.; Lee, M.; Shim, H. J.; Ghaffari, R.; Cho, H. R.; Son, D.; Jung, Y. H.; Soh, M.; Choi, C.; Jung, S.; Chu, K.; Jeon, D.; Lee, S. T.; Kim, J. H.; Choi, S. H.; Hyeon, T.; Kim, D. H. Nat. Commun. 2014, 5, 5747. doi: 10.1038/ncomms6747
钱鑫, 苏萌, 李风煜, 宋延林, 化学学报, 2016, 74, 565. doi: 10.3866/PKU.WHXB201511301Qian, X.; Su, M.; Li, F.; Song, Y. Acta Chim. Sinica 2016, 74, 565 (in Chinese). doi: 10.3866/PKU.WHXB201511301
Johansson, R. S.; Flanagan, J. R. Nat. Rev. Neurosci. 2009, 10, 345.
Park, J.; Kim, M.; Lee, Y.; Lee, H. S.; Ko, H. Sci. Adv. 2015, 1, e1500661. doi: 10.1126/sciadv.1500661
Wang, Q.; Jian, M.; Wang, C.; Zhang, Y. Adv. Funct. Mater. 2017, 27, 1605657. doi: 10.1002/adfm.201605657
Mannsfeld, S. C.; Tee, B. C.; Stoltenberg, R. M.; Chen, C. V.; Barman, S.; Muir, B. V.; Sokolov, A. N.; Reese, C.; Bao, Z. Nat. Mater. 2010, 9, 859. doi: 10.1038/nmat2834
Chen, X.; Shao, J.; An, N.; Li, X.; Tian, H.; Xu, C.; Ding, Y. J. Mater. Chem. C 2015, 3, 11806. doi: 10.1039/C5TC02173A
Wang, X.; Zhang, H.; Dong, L.; Han, X.; Du, W.; Zhai, J.; Pan, C.; Wang, Z. L. Adv. Mater. 2016, 28, 2896. doi: 10.1002/adma.201503407
Zhao, S.; Zhu, R. Adv. Mater. Technol. 2017, 2, 1700183. doi: 10.1002/admt.201700183
Hu, N.; Karube, Y.; Yan, C.; Masuda, Z.; Fukunaga, H. Acta Mater. 2008, 56, 2929. doi: 10.1016/j.actamat.2008.02.030
Shi, Z.; Wu, X.; Zhang, H.; Chai, H.; Li, C. M.; Lu, Z.; Yu, L. J. Colloid Interface Sci. 2019, 534, 618. doi: 10.1016/j.jcis.2018.09.069
蔡依晨, 黄维, 董晓臣, 科学通报, 2016, 62, 635.Cai, Y.; Huang, W.; Dong, X. Chin. Sci. Bull. 2016, 62, 635 (in Chinese).
Pang, C.; Lee, G. Y.; Kim, T. I.; Kim, S. M.; Kim, H. N.; Ahn, S. H.; Suh, K. Y. Nat. Mater. 2012, 11, 795. doi: 10.1038/nmat3380
Pang, Y.; Tian, H.; Tao, L.; Li, Y.; Wang, X.; Deng, N.; Yang, Y.; Ren, T. L. ACS Appl. Mater. Interfaces 2016, 8, 26458. doi: 10.1021/acsami.6b08172
Li, J.; Orrego, S.; Pan, J.; He, P.; Kang, S. H. Nanoscale 2019, 11, 2779. doi: 10.1039/C8NR09959F
Yao, H. B.; Ge, J.; Wang, C. F.; Wang, X.; Hu, W.; Zheng, Z. J.; Ni, Y.; Yu, S. H. Adv. Mater. 2013, 25, 6692. doi: 10.1002/adma.201303041
Wu, J.; Wang, H.; Su, Z.; Zhang, M.; Hu, X.; Wang, Y.; Wang, Z.; Zhong, B.; Zhou, W.; Liu, J.; Xing, S. G. ACS Appl. Mater. Interfaces 2017, 9, 38745. doi: 10.1021/acsami.7b10316
Yang, X.; Wang, Y.; Sun, H.; Qing, X. Sens. Actuators, A 2019, 285, 67. doi: 10.1016/j.sna.2018.10.041
Matsuhisa, N.; Inoue, D.; Zalar, P.; Jin, H.; Matsuba, Y.; Itoh, A.; Yokota, T.; Hashizume, D.; Someya, T. Nat. Mater. 2017, 16, 834. doi: 10.1038/nmat4904
Zou, B.; Chen, Y.; Liu, Y.; Xie, R.; Du, Q.; Zhang, T.; Shen, Y.; Zheng, B.; Li, S.; Wu, J.; Zhang, W.; Huang, W.; Huang, X.; Huo, F. Adv. Sci. 2019, 6, 1801283. doi: 10.1002/advs.201801283
Boland, C. S.; Khan, U.; Ryan, G.; Barwich, S.; Charifou, R.; Harvey, A.; Backes, C.; Li, Z.; Ferreira, M. S.; Mobius, M. E.; Young, R. J.; Coleman, J. N. Science 2016, 354, 1257. doi: 10.1126/science.aag2879
Segev-Bar, M.; Haick, H. ACS Nano 2013, 7, 8366. doi: 10.1021/nn402728g
Su, M.; Li, F.; Chen, S.; Huang, Z.; Qin, M.; Li, W.; Zhang, X.; Song, Y. Adv. Mater. 2016, 28, 1369. doi: 10.1002/adma.201504759
Takei, K.; Yu, Z.; Zheng, M.; Ota, H.; Takahashi, T.; Javey, A. Proc. Natl. Acad. Sci. USA 2014, 111, 1703. doi: 10.1073/pnas.1317920111
Xue, J.; Song, J.; Dong, Y.; Xu, L.; Li, J.; Zeng, H. Sci. Bull. 2017, 62, 143. doi: 10.1016/j.scib.2016.11.009
Ho, M. D.; Ling, Y.; Yap, L. W.; Wang, Y.; Dong, D.; Zhao, Y.; Cheng, W. Adv. Funct. Mater. 2017, 27, 1700845. doi: 10.1002/adfm.201700845
Gong, S.; Schwalb, W.; Wang, Y.; Chen, Y.; Tang, Y.; Si, J.; Shirinzadeh, B.; Cheng, W. Nat. Commun. 2014, 5, 3132. doi: 10.1038/ncomms4132
Lee, S.; Reuveny, A.; Reeder, J.; Lee, S.; Jin, H.; Liu, Q.; Yokota, T.; Sekitani, T.; Isoyama, T.; Abe, Y.; Suo, Z.; Someya, T. Nat. Nanotechnol. 2016, 11, 472. doi: 10.1038/nnano.2015.324
Miyamoto, A.; Lee, S.; Cooray, N. F.; Lee, S.; Mori, M.; Matsuhisa, N.; Jin, H.; Yoda, L.; Yokota, T.; Itoh, A.; Sekino, M.; Kawasaki, H.; Ebihara, T.; Amagai, M.; Someya, T. Nat. Nanotechnol. 2017, 12, 907. doi: 10.1038/nnano.2017.125
Cai, L.; Song, L.; Luan, P.; Zhang, Q.; Zhang, N.; Gao, Q.; Zhao, D.; Zhang, X.; Tu, M.; Yang, F.; Zhou, W.; Fan, Q.; Luo, J.; Zhou, W.; Ajayan, P. M.; Xie, S. Sci. Rep. 2013, 3, 3048. doi: 10.1038/srep03048
Song, Y.; Chen, H.; Chen, X.; Wu, H.; Guo, H.; Cheng, X.; Meng, B.; Zhang, H. Nano Energy 2018, 53, 189. doi: 10.1016/j.nanoen.2018.08.041
Hodlur, R. M.; Rabinal, M. K. Compos. Sci. Technol. 2014, 90, 160. doi: 10.1016/j.compscitech.2013.11.005
Tao, L. Q.; Zhang, K. N.; Tian, H.; Liu, Y.; Wang, D. Y.; Chen, Y. Q.; Yang, Y.; Ren, T. L. ACS Nano 2017, 11, 8790. doi: 10.1021/acsnano.7b02826
Lou, Z.; Chen, S.; Wang, L.; Shi, R.; Li, L.; Jiang, K.; Chen, D.; Shen, G. Nano Energy 2017, 38, 28. doi: 10.1016/j.nanoen.2017.05.024
Tang, X.; Wu, C.; Gan, L.; Zhang, T.; Zhou, T.; Huang, J.; Wang, H.; Xie, C.; Zeng, D. Small 2019, 15, e1804559. doi: 10.1002/smll.201804559
Wang, X.; Gu, Y.; Xiong, Z.; Cui, Z.; Zhang, T. Adv. Mater. 2014, 26, 1336. doi: 10.1002/adma.201304248
Engel, J.; Chen, J.; Liu, C. J. Micromech. Microeng. 2003, 13, 359. doi: 10.1088/0960-1317/13/3/302
Yoon, S.-I.; Kim, Y.-J. J. Micromech. Microeng. 2010, 20, 105017. doi: 10.1088/0960-1317/20/10/105017
Kilaru, R.; Celik-Butler, Z.; Butler, D. P.; Gonenli, I. E. J. Microelectromech. Syst. 2013, 22, 349. doi: 10.1109/JMEMS.2012.2222867
Park, D. Y.; Joe, D. J.; Kim, D. H.; Park, H.; Han, J. H.; Jeong, C. K.; Park, H.; Park, J. G.; Joung, B.; Lee, K. J. Adv. Mater. 2017, 29, 1702308. doi: 10.1002/adma.201702308
Dong, K.; Wu, Z.; Deng, J.; Wang, A. C.; Zou, H.; Chen, C.; Hu, D.; Gu, B.; Sun, B.; Wang, Z. L. Adv. Mater. 2018, 30, 1804944. doi: 10.1002/adma.201804944
Zhao, S.; Zhu, R.; Fu, Y. ACS Appl. Mater. Interfaces 2019, 11, 4588. doi: 10.1021/acsami.8b18639
Lee, H.-K.; Chung, J.; Chang, S.-I.; Yoon, E. J. Micromech. Microeng. 2011, 21, 035010. doi: 10.1088/0960-1317/21/3/035010
Gerratt, A. P.; Michaud, H. O.; Lacour, S. P. Adv. Funct. Mater. 2015, 25, 2287. doi: 10.1002/adfm.201404365
Wan, Y.; Qiu, Z.; Huang, J.; Yang, J.; Wang, Q.; Lu, P.; Yang, J.; Zhang, J.; Huang, S.; Wu, Z.; Guo, C. F. Small 2018, 14, e1801657. doi: 10.1002/smll.201801657
陈瞳, 王瑞荣, 李晓红, 传感技术学报, 2019, 4, 528. doi: 10.3969/j.issn.1004-1699.2019.04.009Chen, T.; Wang, R.; Li, X. J. Transduc. Technol. 2019, 4, 528 (in Chinese). doi: 10.3969/j.issn.1004-1699.2019.04.009
Joo, Y.; Byun, J.; Seong, N.; Ha, J.; Kim, H.; Kim, S.; Kim, T.; Im, H.; Kim, D.; Hong, Y. Nanoscale 2015, 7, 6208. doi: 10.1039/C5NR00313J
Lipomi, D. J.; Vosgueritchian, M.; Tee, B. C.; Hellstrom, S. L.; Lee, J. A.; Fox, C. H.; Bao, Z. Nat. Nanotechnol. 2011, 6, 788. doi: 10.1038/nnano.2011.184
Lee, J.; Kwon, H.; Seo, J.; Shin, S.; Koo, J. H.; Pang, C.; Son, S.; Kim, J. H.; Jang, Y. H.; Kim, D. E.; Lee, T. Adv. Mater. 2015, 27, 2433. doi: 10.1002/adma.201500009
Wang, J.; Jiu, J.; Nogi, M.; Sugahara, T.; Nagao, S.; Koga, H.; He, P.; Suganuma, K. Nanoscale 2015, 7, 2926. doi: 10.1039/C4NR06494A
Atalay, A.; Sanchez, V.; Atalay, O.; Vogt, D. M.; Haufe, F.; Wood, R. J.; Walsh, C. J. Adv. Mater. Technol. 2017, 2, 1700136. doi: 10.1002/admt.201700136
Lee, J.-H.; Yoon, H.-J.; Kim, T. Y.; Gupta, M. K.; Lee, J. H.; Seung, W.; Ryu, H.; Kim, S.-W. Adv. Funct. Mater. 2015, 25, 3203. doi: 10.1002/adfm.201500856
Wang, X.; Song, W. Z.; You, M. H.; Zhang, J.; Yu, M.; Fan, Z.; Ramakrishna, S.; Long, Y. Z. ACS Nano 2018, 12, 8588. doi: 10.1021/acsnano.8b04244
Wu, W.; Wen, X.; Wang, Z. L. Science 2013, 340, 952. doi: 10.1126/science.1234855
Lin, P.; Pan, C.; Wang, Z. L. Mater. Today Nano 2018, 4, 17. doi: 10.1016/j.mtnano.2018.11.006
Akiyama, M.; Morofuji, Y.; Kamohara, T.; Nishikubo, K.; Tsubai, M.; Fukuda, O.; Ueno, N. J. Appl. Phys. 2006, 100, 114318. doi: 10.1063/1.2401312
Kim, H. J.; Kim, Y. J. Mater. Design 2018, 151, 133. doi: 10.1016/j.matdes.2018.04.048
Chen, Z.; Wang, Z.; Li, X.; Lin, Y.; Luo, N.; Long, M.; Zhao, N.; Xu, J. B. ACS Nano 2017, 11, 4507. doi: 10.1021/acsnano.6b08027
Fan, F.-R.; Tian, Z.-Q.; Wang, Z.-L. Nano Energy 2012, 1, 328. doi: 10.1016/j.nanoen.2012.01.004
Yuan, Z.; Zhou, T.; Yin, Y.; Cao, R.; Li, C.; Wang, Z. L. ACS Nano 2017, 11, 8364. doi: 10.1021/acsnano.7b03680
Nie, J.; Chen, X.; Wang, Z. L. Adv. Funct. Mater. 2018, 1806351.
Pu, X.; Hu, W.; Wang, Z. L. Small 2018, 14, 1702817. doi: 10.1002/smll.201702817
Chen, H.; Song, Y.; Cheng, X.; Zhang, H. Nano Energy 2019, 56, 252. doi: 10.1016/j.nanoen.2018.11.061
Wu, H.; Guo, H.; Su, Z.; Shi, M.; Chen, X.; Cheng, X.; Han, M.; Zhang, H. J. Mater. Chem. A 2018, 6, 20277. doi: 10.1039/C8TA08276F
Zhao, S.; Zhu, R. Adv. Mater. Technol. 2019, 4, 1900414. doi: 10.1002/admt.201900414
Fu, Y.; Zhao, S.; Zhu, R. IEEE Trans. Biomed. Eng. 2018, 66, 1412.
Fu, Y.; Zhao, S.; Wang, L.; Zhu, R. Adv. Healthcare Mater. 2019, 8, 1900633. doi: 10.1002/adhm.201900633
Yeom, C.; Chen, K.; Kiriya, D.; Yu, Z.; Cho, G.; Javey, A. Adv. Mater. 2015, 27, 1561. doi: 10.1002/adma.201404850
Wang, C.; Hwang, D.; Yu, Z.; Takei, K.; Park, J.; Chen, T.; Ma, B.; Javey, A. Nat. Mater. 2013, 12, 899. doi: 10.1038/nmat3711
Xu, J.; Wang, S.; Wang, G.-J. N.; Zhu, C.; Luo, S.; Jin, L.; Gu, X.; Chen, S.; Feig, V. R.; To, J. W. F.; Rondeau-Gagné, S.; Park, J.; Schroeder, B. C.; Lu, C.; Oh, J. Y.; Wang, Y.; Kim, Y.-H.; Yan, H.; Sinclair, R.; Zhou, D.; Xue, G.; Murmann, B.; Linder, C.; Cai, W.; Tok, J. B.-H.; Chung, J. W.; Bao, Z. Science 2017, 355, 59. doi: 10.1126/science.aah4496
Wang, Z.; Guo, S.; Li, H.; Wang, B.; Sun, Y.; Xu, Z.; Chen, X.; Wu, K.; Zhang, X.; Xing, F.; Li, L.; Hu, W. Adv. Mater. 2019, 31, e1805630.
Sun, Q.-J.; Li, T.; Wu, W.; Venkatesh, S.; Zhao, X.-H.; Xu, Z.-X.; Roy, V. A. L. ACS Appl. Electron. Mater. 2019, 1, 711. doi: 10.1021/acsaelm.9b00081
Wang, S.; Xu, J.; Wang, W.; Wang, G. N.; Rastak, R.; Molina-Lopez, F.; Chung, J. W.; Niu, S.; Feig, V. R.; Lopez, J.; Lei, T.; Kwon, S. K.; Kim, Y.; Foudeh, A. M.; Ehrlich, A.; Gasperini, A.; Yun, Y.; Murmann, B.; Tok, J. B.; Bao, Z. Nature 2018, 555, 83. doi: 10.1038/nature25494
Takei, K.; Takahashi, T.; Ho, J. C.; Ko, H.; Gillies, A. G.; Leu, P. W.; Fearing, R. S.; Javey, A. Nat. Mater. 2010, 9, 821. doi: 10.1038/nmat2835
Zang, Y.; Zhang, F.; Huang, D.; Gao, X.; Di, C. A.; Zhu, D. Nat. Commun. 2015, 6, 6269. doi: 10.1038/ncomms7269
Chia, B. T.; Duo-Ru, C.; Hsin-Hung, L.; Yao-Joe, Y.; Wen-Pin, S.; Fu-Yu, C.; Kuang-Chao, F. In IEEE International Conference of Micro Electro Mechanical Systems (MEMS), Hyogo, Japan, 2007, p. 589.
Xu, B.; Akhtar, A.; Liu, Y.; Chen, H.; Yeo, W. H.; Park, S. I.; Boyce, B.; Kim, H.; Yu, J.; Lai, H. Y.; Jung, S.; Zhou, Y.; Kim, J.; Cho, S.; Huang, Y.; Bretl, T.; Rogers, J. A. Adv. Mater. 2016, 28, 4462. doi: 10.1002/adma.201504155
Engel, J.; Chen, J.; Fan, Z.; Liu, C. Sens. Actuators, A 2005, 117, 50. doi: 10.1016/j.sna.2004.05.037
Webb, R. C.; Bonifas, A. P.; Behnaz, A.; Zhang, Y.; Yu, K. J.; Cheng, H.; Shi, M.; Bian, Z.; Liu, Z.; Kim, Y. S.; Yeo, W. H.; Park, J. S.; Song, J.; Li, Y.; Huang, Y.; Gorbach, A. M.; Rogers, J. A. Nat. Mater. 2013, 12, 938. doi: 10.1038/nmat3755
Han, I. Y.; Kim, S. J. Sens. Actuators, A 2008, 141, 52. doi: 10.1016/j.sna.2007.07.020
Yang, J.; Wei, D.; Tang, L.; Song, X.; Luo, W.; Chu, J.; Gao, T.; Shi, H.; Du, C. RSC Adv. 2015, 5, 25609. doi: 10.1039/C5RA00871A
Shih, W. P.; Tsao, L. C.; Lee, C. W.; Cheng, M. Y.; Chang, C.; Yang, Y. J.; Fan, K. C. Sensors 2010, 10, 3597. doi: 10.3390/s100403597
Yang, Y.; Lin, Z.-H.; Hou, T.; Zhang, F.; Wang, Z. L. Nano Res. 2012, 5, 888. doi: 10.1007/s12274-012-0272-8
Agarwal, K.; Kaushik, V.; Varandani, D.; Dhar, A.; Mehta, B. R. J. Alloys Compd. 2016, 681, 394. doi: 10.1016/j.jallcom.2016.04.161
Vieira, E. M. F.; Figueira, J.; Pires, A. L.; Grilo, J.; Silva, M. F.; Pereira, A. M.; Goncalves, L. M. J. Alloys Compd. 2019, 774, 1102. doi: 10.1016/j.jallcom.2018.09.324
Fourmont, P.; Gerlein, L. F.; Fortier, F. X.; Cloutier, S. G.; Nechache, R. ACS Appl. Mater. Interfaces 2018, 10, 10194. doi: 10.1021/acsami.7b18852
Shi, Y.; Wang, Y.; Deng, Y.; Gao, H.; Lin, Z.; Zhu, W.; Ye, H. Energy Convers. Manage. 2014, 80, 110. doi: 10.1016/j.enconman.2014.01.010
Zeng, X.; Yan, C.; Ren, L.; Zhang, T.; Zhou, F.; Liang, X.; Wang, N.; Sun, R.; Xu, J.-B.; Wong, C.-P. Adv. Electron. Mater. 2019, 5, 1800612. doi: 10.1002/aelm.201800612
Yu, X.; Chen, X.; Yu, X.; Chen, X.; Ding, X.; Zhao, X. IEEE Trans. Electron Devices 2019, 66, 1911. doi: 10.1109/TED.2019.2897142
Li, T.; Li, L.; Sun, H.; Xu, Y.; Wang, X.; Luo, H.; Liu, Z.; Zhang, T. Adv. Sci. 2017, 4, 1600404. doi: 10.1002/advs.201600404
Zhu, P.; Liu, Y.; Fang, Z.; Kuang, Y.; Zhang, Y.; Peng, C.; Chen, G. Langmuir 2019, 35, 4834. doi: 10.1021/acs.langmuir.8b04259
Wu, J.; Sun, Y. M.; Wu, Z.; Li, X.; Wang, N.; Tao, K.; Wang, G. P. ACS Appl. Mater. Interfaces 2019, 11, 4242. doi: 10.1021/acsami.8b18599
Lv, C.; Hu, C.; Luo, J.; Liu, S.; Qiao, Y.; Zhang, Z.; Song, J.; Shi, Y.; Cai, J.; Watanabe, A. Nanomaterials (Basel) 2019, 9, 422. doi: 10.3390/nano9030422
Pang, Y.; Jian, J.; Tu, T.; Yang, Z.; Ling, J.; Li, Y.; Wang, X.; Qiao, Y.; Tian, H.; Yang, Y.; Ren, T. L. Biosens. Bioelectron. 2018, 116, 123. doi: 10.1016/j.bios.2018.05.038
Choi, S. J.; Yu, H.; Jang, J. S.; Kim, M. H.; Kim, S. J.; Jeong, H. S.; Kim, I. D. Small 2018, 14, 1703934. doi: 10.1002/smll.201703934
Trung, T. Q.; Duy, L. T.; Ramasundaram, S.; Lee, N.-E. Nano Res. 2017, 10, 2021. doi: 10.1007/s12274-016-1389-y
Jiang, P.; Zhao, S.; Zhu, R. Sensors 2015, 15, 31738. doi: 10.3390/s151229881
Zhao, S.; Zhu, R. Adv. Mater. Technol. 2018, 3, 1800056. doi: 10.1002/admt.201800056
Dinh, T.; Phan, H.-P.; Nguyen, T.-K.; Qamar, A.; Woodfield, P.; Zhu, Y.; Nguyen, N.-T.; Viet Dao, D. J. Phys. D: Appl. Phys. 2017, 50, 215401. doi: 10.1088/1361-6463/aa6cd6
Dieffenderfer, J.; Goodell, H.; Mills, S.; McKnight, M.; Yao, S.; Lin, F.; Beppler, E.; Bent, B.; Lee, B.; Misra, V.; Zhu, Y.; Oralkan, O.; Strohmaier, J.; Muth, J.; Peden, D.; Bozkurt, A. IEEE J. Biomed. Health Inform. 2016, 20, 1251. doi: 10.1109/JBHI.2016.2573286
Cao, Z.; Zhu, R.; Que, R. Y. IEEE Trans. Biomed. Eng. 2012, 59, 3110. doi: 10.1109/TBME.2012.2211354
Que, R.; Zhu, R. Sensors 2013, 14, 564. doi: 10.3390/s140100564
Li, G.; Zhao, S.; Zhu, R. IEEE Sens. J. 2019, 19, 297. doi: 10.1109/JSEN.2018.2874809
Que, R.-Y.; Zhu, R. IEEE Sens. J. 2015, 15, 1931. doi: 10.1109/JSEN.2014.2367017
Nguyen, N. Flow Meas. Instrum. 1997, 8, 7. doi: 10.1016/S0955-5986(97)00019-8
Kuo, J. T.; Yu, L.; Meng, E. Micromachines 2012, 3, 550. doi: 10.3390/mi3030550
Liu, P.; Zhu, R.; Que, R. Sensors 2009, 9, 9533. doi: 10.3390/s91209533
Bruun, H. H., Hot-Wire Anemometry: Principles and Signal Analysis, Oxford University Press, New York, USA, 1995.
Mailly, F.; Giani, A.; Bonnot, R.; Temple-Boyer, P.; Pascal-Delannoy, F.; Foucaran, A.; Boyer, A. Sens. Actuators, A 2001, 94, 32. doi: 10.1016/S0924-4247(01)00668-9
Kim, S.; Nam, T.; Park, S. Sens. Actuators, A 2004, 114, 312. doi: 10.1016/j.sna.2003.12.019
Kim, T. H.; Kim, D.-K.; Kim, S. J. Int. J. Heat Mass Transfer 2009, 52, 2140. doi: 10.1016/j.ijheatmasstransfer.2008.10.006
Jiang, P.; Zhu, R.; Dong, X.; Chang, Y. Sleep Breath. 2017, 22, 123.
Zhang, J.; Liu, S.; Zhu, R. IEEE Access 2019, doi: 10.1109/ACCESS.2019.2921978.
Liu, S.; Zhang, J.; Zhu, R. IEEE Trans. Biomed. Eng. 2019, doi: 10.1109/TBME.2019.2924689.
Dinh, T.; Phan, H.-P.; Nguyen, T.-K.; Qamar, A.; Foisal, A. R. M.; Nguyen Viet, T.; Tran, C.-D.; Zhu, Y.; Nguyen, N.-T.; Dao, D. V. J. Mater. Chem. C 2016, 4, 10061. doi: 10.1039/C6TC02708C
Zhao, D.; Qian, X.; Gu, X.; Jajja, S. A.; Yang, R. J. Electron. Packaging 2016, 138, 040802. doi: 10.1115/1.4034605
Pope, A.; Zawilski, B.; Tritt, T. Cryogenics 2001, 41, 725. doi: 10.1016/S0011-2275(01)00140-0
Zawilski, B. M.; Littleton, R. T.; Tritt, T. M. Rev. Sci. Instrum. 2001, 72, 1770. doi: 10.1063/1.1347980
Zhu, J.; Tang, D.; Wang, W.; Liu, J.; Holub, K. W.; Yang, R. J. Appl. Phys. 2010, 108, 094315. doi: 10.1063/1.3504213
Gustafsson, S. E. Rev. Sci. Instrum. 1991, 62, 797. doi: 10.1063/1.1142087
Assael, M. J.; Antoniadis, K. D.; Wakeham, W. A. Int. J. Thermophys. 2010, 31, 1051. doi: 10.1007/s10765-010-0814-9
Lee, J.; Lee, H.; Baik, Y.-J.; Koo, J. Int. J. Heat Mass Transfer 2015, 89, 116. doi: 10.1016/j.ijheatmasstransfer.2015.05.064
Ruoho, M.; Valset, K.; Finstad, T.; Tittonen, I. Nanotechnology 2015, 26, 195706. doi: 10.1088/0957-4484/26/19/195706
Mishra, V.; Hardin, C. L.; Garay, J. E.; Dames, C. Rev. Sci. Instrum. 2015, 86, 054902. doi: 10.1063/1.4918800
Tian, L.; Li, Y.; Webb, R. C.; Krishnan, S.; Bian, Z.; Song, J.; Ning, X.; Crawford, K.; Kurniawan, J.; Bonifas, A.; Ma, J.; Liu, Y.; Xie, X.; Chen, J.; Liu, Y.; Shi, Z.; Wu, T.; Ning, R.; Li, D.; Sinha, S.; Cahill, D. G.; Huang, Y.; Rogers, J. A. Adv. Funct. Mater. 2017, 27, 1701282. doi: 10.1002/adfm.201701282
Russell, R. A.; Paoloni, F. J. IEEE Trans. Instrum. Meas. 1985, 34, 458.
Wade, J.; Bhattacharjee, T.; Williams, R. D.; Kemp, C. C. Robot. Auton. Syst. 2017, 96, 1. doi: 10.1016/j.robot.2017.06.008
Siegel, D.; Garabieta, I.; Hollerbach, J. In IEEE International Conference of Robotics and Automation (ICRA), New York, USA, 1986, p. 1286.
Lin, C. H.; Erickson, T. W.; Fishel, J. A.; Wettels, N.; Loeb, G. E. In IEEE International Conference of Robotics and Biomimetics (ROBIO), Guilin, China, 2009, p. 129.
Kerr, E.; McGinnity, T. M.; Coleman, S. In IEEE International Conference of Robotics and Biomimetics (ROBIO), Shenzhen, China, 2013, p. 1048.
Bhattacharjee, T.; Wade, J.; Kemp, C. C. In Proceedings of Robotics: Science and Systems, Rome, Italy, 2015.
Eguíluz, A. G.; Raño, I.; Coleman, S. A.; McGinnity, T. M. In IEEE International Conference of Intelligent Robots and Systems (IROS), Daejeon, South Korea, 2016, p. 4912.
Kerr, E.; McGinnity, T. M.; Coleman, S. Expert Syst. Appl. 2018, 94, 94. doi: 10.1016/j.eswa.2017.10.045
Bhattacharjee, T.; Clever, H. M.; Wade, J.; Kemp, C. IEEE Robot. Autom. Lett. 2018, 3, 2523. doi: 10.1109/LRA.2018.2810956
Xu, D.; Loeb, G. E.; Fishel, J. A. In IEEE International Conference of Robotics and Automation (ICRA), New Jersey, USA, 2013, p. 3056.
Yeo, W. H.; Kim, Y. S.; Lee, J.; Ameen, A.; Shi, L.; Li, M.; Wang, S.; Ma, R.; Jin, S. H.; Kang, Z.; Huang, Y.; Rogers, J. A. Adv. Mater. 2013, 25, 2773. doi: 10.1002/adma.201204426
Kim, M.-g.; Alrowais, H.; Brand, O. Adv. Electron. Mater. 2018, 4, 1700434. doi: 10.1002/aelm.201700434
Chung, H. U.; Kim, B. H.; Lee, J. Y.; Lee, J.; Xie, Z.; Ibler, E. M.; Lee, K.; Banks, A.; Jeong, J. Y.; Kim, J.; Ogle, C.; Grande, D.; Yu, Y.; Jang, H.; Assem, P.; Ryu, D.; Kwak, J. W.; Namkoong, M.; Park, J. B.; Lee, Y.; Kim, D. H.; Ryu, A.; Jeong, J.; You, K.; Ji, B.; Liu, Z.; Huo, Q.; Feng, X.; Deng, Y.; Xu, Y.; Jang, K.-I.; Kim, J.; Zhang, Y.; Ghaffari, R.; Rand, C. M.; Schau, M.; Hamvas, A.; Weese-Mayer, D. E.; Huang, Y.; Lee, S. M.; Lee, C. H.; Shanbhag, N. R.; Paller, A. S.; Xu, S.; Rogers, J. A. Science 2019, 363, eaau0780. doi: 10.1126/science.aau0780
Hua, Q.; Sun, J.; Liu, H.; Bao, R.; Yu, R.; Zhai, J.; Pan, C.; Wang, Z. L. Nat. Commun. 2018, 9, 244. doi: 10.1038/s41467-017-02685-9
Kabiri Ameri, S.; Ho, R.; Jang, H.; Tao, L.; Wang, Y.; Wang, L.; Schnyer, D. M.; Akinwande, D.; Lu, N. ACS Nano 2017, 11, 7634. doi: 10.1021/acsnano.7b02182
Wang, Y.; Qiu, Y.; Ameri, S. K.; Jang, H.; Dai, Z.; Huang, Y.; Lu, N. npj Flex. Electron. 2018, 2, 6. doi: 10.1038/s41528-017-0019-4
Jang, K. I.; Li, K.; Chung, H. U.; Xu, S.; Jung, H. N.; Yang, Y.; Kwak, J. W.; Jung, H. H.; Song, J.; Yang, C.; Wang, A.; Liu, Z.; Lee, J. Y.; Kim, B. H.; Kim, J. H.; Lee, J.; Yu, Y.; Kim, B. J.; Jang, H.; Yu, K. J.; Kim, J.; Lee, J. W.; Jeong, J. W.; Song, Y. M.; Huang, Y.; Zhang, Y.; Rogers, J. A. Nat. Commun. 2017, 8, 15894. doi: 10.1038/ncomms15894
Lee, H.; Song, C.; Hong, Y. S.; Kim, M. S.; Cho, H. R.; Kang, T.; Shin, K.; Choi, S. H.; Hyeon, T.; Kim, D.-H. Sci. Adv. 2017, 3, e1601314.
Koh, A.; Kang, D.; Xue, Y.; Lee, S.; Pielak, R. M.; Kim, J.; Hwang, T.; Min, S.; Banks, A.; Bastien, P.; Rogers, J. A. Sci. Transl. Med. 2016, 8, 366ra165.
Gao, W.; Emaminejad, S.; Nyein, H. Y. Y.; Challa, S.; Chen, K.; Peck, A.; Fahad, H. M.; Ota, H.; Shiraki, H.; Kiriya, D.; Javey, A. Nature 2016, 529, 509. doi: 10.1038/nature16521
Chen, Y.; Lu, S.; Zhang, S.; Li, Y.; Qu, Z.; Chen, Y.; Lu, B.; Wang, X.; Feng, X. Sci. Adv. 2017, 3, e1701629. doi: 10.1126/sciadv.1701629
Lipani, L.; Dupont, B. G. R.; Doungmene, F.; Marken, F.; Tyrrell, R. M.; Guy, R. H.; Ilie, A. Nat. Nanotechnol. 2018, 13, 504. doi: 10.1038/s41565-018-0112-4
Kim, S. Y.; Park, S.; Park, H. W.; Park, D. H.; Jeong, Y.; Kim, D. H. Adv. Mater. 2015, 27, 4178. doi: 10.1002/adma.201501408
Tien, N. T.; Jeon, S.; Kim, D. I.; Trung, T. Q.; Jang, M.; Hwang, B. U.; Byun, K. E.; Bae, J.; Lee, E.; Tok, J. B.; Bao, Z.; Lee, N. E.; Park, J. J. Adv. Mater. 2014, 26, 796. doi: 10.1002/adma.201302869
Kim, D. I.; Trung, T. Q.; Hwang, B. U.; Kim, J. S.; Jeon, S.; Bae, J.; Park, J. J.; Lee, N. E. Sci. Rep. 2015, 5, 12705. doi: 10.1038/srep12705
Lee, J. S.; Shin, K. Y.; Cheong, O. J.; Kim, J. H.; Jang, J. Sci. Rep. 2015, 5, 7887. doi: 10.1038/srep07887
Hou, C.; Wang, H.; Zhang, Q.; Li, Y.; Zhu, M. Adv. Mater. 2014, 26, 5018. doi: 10.1002/adma.201401367
Ai, Y.; Lou, Z.; Chen, S.; Chen, D.; Wang, Z. M.; Jiang, K.; Shen, G. Nano Energy 2017, 35, 121. doi: 10.1016/j.nanoen.2017.03.039
Zhang, F.; Zang, Y.; Huang, D.; Di, C. A.; Zhu, D. Nat. Commun. 2015, 6, 8356. doi: 10.1038/ncomms9356
Ho, D. H.; Sun, Q.; Kim, S. Y.; Han, J. T.; Kim do, H.; Cho, J. H. Adv. Mater. 2016, 28, 2601. doi: 10.1002/adma.201505739
Zhao, S.; Zhu, R. Adv. Mater. 2017, 29, 1606151. doi: 10.1002/adma.201606151
Zhao, S.; Jiang, P.; Zhu, R.; Que, R. In IEEE Sensors Conference, Orlando, USA, 2016, p. 1.
Zhao, S.; Zhu, R. In International Conference of Flexible and Printed Electronics (ICFPE), Beijing, China, 2014, p. 89.
Tee, B. C.; Chortos, A.; Berndt, A.; Nguyen, A. K.; Tom, A.; McGuire, A.; Lin, Z. C.; Tien, K.; Bae, W. G.; Wang, H.; Mei, P.; Chou, H. H.; Cui, B.; Deisseroth, K.; Ng, T. N.; Bao, Z. Science 2015, 350, 313. doi: 10.1126/science.aaa9306
Kim, Y.; Chortos, A.; Xu, W.; Liu, Y.; Oh, J. Y.; Son, D.; Kang, J.; Foudeh, A. M.; Zhu, C.; Lee, Y.; Niu, S.; Liu, J.; Pfattner, R.; Bao, Z.; Lee, T.-W. Science 2018, 360, 998. doi: 10.1126/science.aao0098

图 2 基于压阻、压容、压电、摩擦电、压热效应的柔性压力传感器
Figure 2 Flexible pressure sensors based on piezoresistive, piezocapacitive, piezoelectric, triboelectric and piezothermic mechanisms
(a) Schematic structure of flexible pressure sensor based on a PANI-HNSCF[41]. (b) Flexible pressure sensors based on stretchable silicon nanoribbon with and without cavities[8]. (c) Capacitive flexible pressure sensors based on microstructured PDMS films[13]. (d) Flexible piezoelectric sensors based on PZT and used for arterial pulse monitoring[47]. (e) Skin-inspired triboelectric nanogenerator based on continuous, planar and "chain-link" fence-shaped interlaced conductive network and used for sensing mechanical stimuli and harvesting biomechanical energy[48]. (f) Flexible pressure sensor based on piezothermic transduction. Porous materials and serial-model materials serve as the functional materials that transfer pressure to thermal condutivity[49]

图 3 柔性温度、湿度、流场、物质传感器
Figure 3 Flexible temperature, humidity, flow and matter sensors
(a) Flexible temperature sensor based on graphene nanowalls[88]. (b) High performance flexible thermoelectric sensor based on silver telluride nanowire[95]. (c) Flexible humidity sensor based on porous ionic membrane[97]. (d) Flexible flow sensor based on hot-film and used for smart sensing strip for noninvasively monitoring respiratory[104]. (e) Ultrathin conformal gold-based devices for thermal characterization of human skin[86]. (f) A smart artificial finger with multisensations of matter, temperature and proximity[105]

图 4 基于“直接集成法”的多功能柔性电子皮肤
Figure 4 Multifunctional flexible electronic skin based on "direct- integration" mechanism
(a) Multifunctional electronics with physical properties matched to the epidermis[1]. (b) Wireless multifunctional epidermal electronic systems for neonatal intensive care[145]. (c) Multifunctional sensing matrix networks with skin-inspired highly stretchable and conformable architecture[146]

图 5 基于“功能材料法”的多功能柔性电子皮肤
Figure 5 Multifunctional flexible electronic skin based on "functional- materials" mechanism
(a) Temperature-pressure dual-parameter sensors using microstructure- frame-supported organic thermoelectric materials[161]. (b) Multimodal all-graphene electronic skin with capabilities of detecting pressure, temperature and humidity[162]

图 6 基于热感应的多维信息传感机制及柔性电子皮肤
Figure 6 Schematic of the multi-sensing mechanism and multifunctional flexible electronic skin based on thermosensation
(a) Schematic of the multi-sensing mechanism. (b) Multifunctional electronic skin based on thermosensation with capabilities of sensing pressure, temperature, matter and flow[163]

 扫一扫看文章
扫一扫看文章

扫一扫关注我们
 下载:
下载:

 下载:
下载:
 下载:
下载: